- Example 1.1
Consider a map  with domain
with domain  and codomain
and codomain  (fixing
(fixing

as the bases for these spaces) that is determined by this action on the vectors in the domain's basis.

To compute the action of this map on any vector at all from the domain,
we first express  and
and  with respect to the codomain's basis:
with respect to the codomain's basis:

and

(these are easy to check).
Then, as described in the preamble, for any member  of the domain,
we can express the image
of the domain,
we can express the image  in terms of the
in terms of the  's.
's.

Thus,
with  then
then  .
.
For instance,
with  then
then
 .
.
We will express computations like the one above with a matrix notation.

In the middle is the argument to the map,
represented with respect to the domain's basis  by a column vector with components
by a column vector with components  and
and  .
On the right is the value of the map on that argument,
represented with respect to the codomain's basis
.
On the right is the value of the map on that argument,
represented with respect to the codomain's basis  by a column vector with components
by a column vector with components  , etc.
The matrix on the left is the new thing.
It consists of the coefficients from the vector on the right,
, etc.
The matrix on the left is the new thing.
It consists of the coefficients from the vector on the right,
 and
and  from the first row,
from the first row,  and
and  from the
second row, and and from the third row.
from the
second row, and and from the third row.
This notation simply breaks the parts from the right,
the coefficients and the  's, out separately on the left, into a vector that
represents the map's argument and a matrix that we will take to
represent the map itself.
's, out separately on the left, into a vector that
represents the map's argument and a matrix that we will take to
represent the map itself.
- Definition 1.2
Suppose that  and
and  are vector spaces of dimensions
are vector spaces of dimensions  and
and
 with bases and ,
and that
with bases and ,
and that  is a linear map.
If
is a linear map.
If

then

is the matrix representation of with respect to  .
.
Briefly, the vectors
representing the 's are adjoined to
make the matrix representing the map.

Observe that the number of columns of the matrix is the
dimension of the domain of the map,
and the number of rows is the dimension of the codomain.
- Example 1.3
If  is given by
is given by

then where

the action of on is given by

and a simple calculation gives

showing that this is the matrix representing with respect to the bases.

We will use lower case letters for a map,
upper case for the matrix,
and lower case again for the entries of the matrix.
Thus for the map , the matrix representing it is  , with
entries
, with
entries  .
.
- Theorem 1.4
Assume that and are vector spaces
of dimensions and
with bases and ,
and that is a linear map.
If is represented by
and  is represented by
is represented by

then the representation of the image of is this.

We will think of the matrix  and the vector
and the vector  as combining to make the vector
as combining to make the vector  .
.
- Definition 1.5
The matrix-vector product of a  matrix and a
matrix and a
 vector is this.
vector is this.

The point of Definition 1.2 is to generalize
Example 1.1, that is, the point of the definition is
Theorem 1.4,
that the matrix describes how to get from the
representation of a domain vector with respect to the domain's basis to the
representation of its image in the codomain with respect to the codomain's
basis.
With Definition 1.5, we can restate this
as: application of a linear map is represented by the matrix-vector product
of the map's representative and the vector's representative.
- Example 1.7
Let  be projection onto the
be projection onto the  -plane.
To give a matrix representing this map, we first fix bases.
-plane.
To give a matrix representing this map, we first fix bases.

For each vector in the domain's basis, we find its image under the map.

Then we find the representation of each image with respect to the codomain's
basis

(these are easily checked).
Finally, adjoining these representations gives the matrix representing
 with respect to .
with respect to .

We can illustrate Theorem 1.4 by computing
the matrix-vector product representing the following statement
about the projection map.

Representing this vector from the domain
with respect to the domain's basis

gives this matrix-vector product.

Expanding this representation into a linear combination of vectors from

checks that the map's action is indeed
reflected in the operation of the matrix.
(We will sometimes compress these three displayed equations into one

in the course of a calculation.)
We now have two ways to compute the effect of projection,
the straightforward formula that drops each three-tall vector's third component
to make a two-tall vector,
and the above formula that uses representations and matrix-vector
multiplication.
Compared to the first way, the second way might seem complicated.
However, it has advantages.
The next example shows that giving a formula for some maps is
simplified by this new scheme.
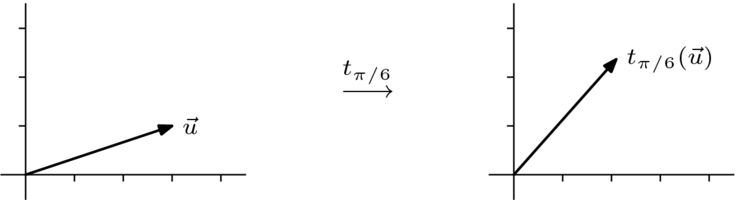
- Example 1.8
To represent a rotation
map  that
turns all vectors in the plane counterclockwise through an angle
that
turns all vectors in the plane counterclockwise through an angle 
we start by fixing bases.
Using  both as a domain basis and as a codomain basis is natural,
Now, we find the image under the map of each
vector in the domain's basis.
both as a domain basis and as a codomain basis is natural,
Now, we find the image under the map of each
vector in the domain's basis.

Then we represent these images with respect to the codomain's basis.
Because this basis is , vectors are represented by themselves.
Finally, adjoining the representations gives the matrix representing the map.

The advantage of this scheme is that just by knowing how to
represent the image of the two basis vectors,
we get a formula that tells us the image of any vector at
all; here a vector rotated by  .
.

(Again, we are using the fact that, with respect to , vectors represent themselves.)
We have already seen the addition and scalar multiplication
operations of matrices and
the dot product operation of vectors.
Matrix-vector multiplication is a new operation in the arithmetic of
vectors and matrices.
Nothing in Definition 1.5 requires us to view
it in terms of representations.
We can get some insight into this operation
by turning away from what is being represented, and instead focusing on
how the entries combine.
- Example 1.9
In the definition
the width of the matrix equals the height of the vector.
Hence, the first product below is defined while the second is not.

One reason that this product is not defined is purely formal: the
definition requires that the sizes match, and these sizes don't match.
Behind the formality, though,
is a reason why we will leave it undefined— the
matrix represents a map with a three-dimensional domain while the vector represents a member of a two-dimensional space.
A good way to view a matrix-vector product is
as the dot products of the rows of the matrix with the column vector.

Looked at in this row-by-row way,
this new operation generalizes dot product.
Matrix-vector product can also be viewed column-by-column.

- Example 1.10

The result has the
columns of the matrix weighted by the entries of the vector.
This way of looking at it
brings us back to the objective stated at the start of this section, to compute
 as
as
 .
.
We began this section
by noting that the equality of these two enables us to compute the action
of on any
argument knowing only , ...,  .
We have developed this into a scheme to
compute the action of the map by taking
the matrix-vector product of the matrix representing the
map and the vector representing the argument.
In this way, any linear map is represented with respect to some bases
by a matrix.
In the next subsection, we will show the converse, that any matrix represents
a linear map.
.
We have developed this into a scheme to
compute the action of the map by taking
the matrix-vector product of the matrix representing the
map and the vector representing the argument.
In this way, any linear map is represented with respect to some bases
by a matrix.
In the next subsection, we will show the converse, that any matrix represents
a linear map.
- This exercise is recommended for all readers.
- This exercise is recommended for all readers.
- Problem 3
Solve this matrix equation.

- This exercise is recommended for all readers.
- This exercise is recommended for all readers.
- Problem 5
Assume that  is determined by
this action.
is determined by
this action.

Using the standard bases, find
- the matrix representing this map;
- a general formula for .
- This exercise is recommended for all readers.
- Problem 6
Let  be the derivative
transformation.
be the derivative
transformation.
- Represent
 with respect to
with respect to  where
where
 .
.
- Represent with respect to where
 .
.
- This exercise is recommended for all readers.
- Problem 7
Represent each linear map with respect to each pair of bases.
-
 with respect to
where
with respect to
where  , given by
, given by

-
 with respect to
with respect to
 where
where  , given by
, given by

-
 with respect to
with respect to
 where
and
where
and  , given by
, given by

-
 with respect to
where
and , given by
with respect to
where
and , given by

-
 with respect
to where
with respect
to where  , given by
, given by

- Problem 8
Represent the identity map on any nontrivial
space with respect to , where is any basis.
- Problem 9
Represent, with respect to the natural basis,
the transpose transformation on the space
 of
of  matrices.
matrices.
- Problem 10
Assume that
 is a basis for a vector space.
Represent with respect to the transformation that is determined
by each.
is a basis for a vector space.
Represent with respect to the transformation that is determined
by each.
-
 ,
,
 ,
,
 ,
,

- ,
 ,
,
,
,
- ,
,
 ,
,
- This exercise is recommended for all readers.
- Problem 13
Suppose that is nonsingular so that
by Theorem II.2.21, for any basis
 the image
the image
 is a basis for .
is a basis for .
- Represent the map with respect to
 .
.
- For a member of the domain, where
the representation of has components , ...,
 ,
represent the image vector with respect to
the image basis
,
represent the image vector with respect to
the image basis  .
.
- Problem 14
Give a formula for the product of a matrix and  , the
column vector that is all zeroes except for a single one in the
, the
column vector that is all zeroes except for a single one in the  -th
position.
-th
position.
- This exercise is recommended for all readers.
- Problem 15
For each vector space of functions of one real variable,
represent the derivative transformation with respect to .
-
 ,
,

-
 ,
,

-
 ,
,

- This exercise is recommended for all readers.
- Problem 17
Can one matrix represent two different linear maps?
That is, can  ?
?
- This exercise is recommended for all readers.
- Problem 20 (Schur's Triangularization Lemma)
- Let
 be a subspace of and fix bases
be a subspace of and fix bases
 .
What is the relationship between the representation of a vector
from with
respect to
.
What is the relationship between the representation of a vector
from with
respect to  and the representation of that vector
(viewed as a member of ) with
respect to
and the representation of that vector
(viewed as a member of ) with
respect to  ?
?
- What about maps?
- Fix a basis
 for and observe that the spans
for and observe that the spans
![{\displaystyle [\{{\vec {0}}\}]=\{{\vec {0}}\}\subset [\{{\vec {\beta }}_{1}\}]\subset [\{{\vec {\beta }}_{1},{\vec {\beta }}_{2}\}]\subset \quad \cdots \quad \subset [B]=V}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3414ca6462a266e81a770fece4e99534b9ae335d)
form a strictly increasing chain of subspaces.
Show that for any linear map there is a chain
 of
subspaces of such that
of
subspaces of such that
![{\displaystyle h([\{{\vec {\beta }}_{1},\dots ,{\vec {\beta }}_{i}\}])\subset W_{i}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8a96d738e2b917d08ef2413bf0cccf59449c4022)
for each .
- Conclude that for every linear map
there are
bases so the matrix representing with respect to
is upper-triangular
(that is, each entry with
 is zero).
is zero).
- Is an upper-triangular representation unique?
Solutions































